
一、系统简介
D2000 无人机系统是飞马全新研发的一款小型、长航时但同时能满足高精度测绘、遥感及视频应用的多旋翼无人机系统,可搭载航测模块、倾斜模块、可见光视频模块、热红外视频模块、热红外遥感模块、激光雷达模块等,具备多源化数据获取能力。系统标准起飞重量2.8kg,标准载荷200g,续航时间74分钟。安徽墨卡托科技有限公司推荐该产品因为全系统模块化分解后可集成在一个作业箱中,便于携行、运输。
D2000的任务载荷采用模块化设计,搭配航测模块、倾斜模块、热红外遥感模块,可满足航测、真三维模型、遥感监测应用;搭载激光雷达模块,可获取高精度点云数据;此外还可换装可见光视频模块、热红外视频模块等视频应用载荷,搭载远距离图传,可实现目标识别、目标定位、目标实时追踪和目标位置、速度估算等功能。
D2000搭配高精度差分GNSS板卡,同时标配网络RTK、PPK及其融合解算服务;可实现无控制点的1:500成图,支持高精度POS辅助空三,实现免像控应用。安徽墨卡托科技有限公司推荐的此套方案配备“无人机管家专业版(测量版)”软件,具备各种应用需求的航线模式。支持精准三维航线规划、三维实时飞行监控、GPS融合解算、控制点量测、空三解算、一键成图、一键导出立体测图,提供DOM,DEM,DSM,TDOM等多种数据成果处理及浏览。
二、系统参数
2.1飞行平台参数
空机重量:2.6kg
最大起飞/标准重量:3.35kg/2.8kg
最大载重能力:750g
对称电机轴距:598mm
外形尺寸:展开 495×442×279mm(不含桨叶)
折叠 :495×442×143mm(不含桨叶)
导航卫星:GPS,BeiDou,GLONASS
动力方式:电动
飞行器最大速度:20m/s(飞机倾斜25度时)
最远航程巡航速度:13.5m/s(最远航程50Km)
最长航时巡航速度:7.0m/s(最长航时74分钟)
悬停时间:60min(挂载单相机载荷海平面悬停)
最大爬升速度:8.0m/s(手动),5.0m/s(自动)
最大下降速度:5.0m/s(手动),3.0m/s(自动)
悬停精度RTK:水平1cm+1ppm 垂直2cm+1ppm
差分GPS更新频率:20HZ
最大起飞海拔高度:6000m
抗风能力:6级(10.8~13.8m/s)
任务响应时间:展开≤10min,撤收≤15min·
测控半径:图传≮5km 数传≮20km
起降方式:无遥控器垂直起降
工作温度:-20~45℃
2.2双频GPS导航模块参数
导航卫星:GPS:L1+L2
BeiDou:B1+B2
GLONASS:L1+L2
采样频率:20Hz
定位精度:5cm
差分模式:PPK/RTK及其融合作业模式
2.3 D-LiDAR2000轻型激光雷达系统载荷参数
|
D-LiDAR2000参数表 |
||
|
型号 |
D-LiDAR2000 |
|
|
搭载平台 |
D2000 |
|
|
水平视场角 |
70.4° |
|
|
垂直视场角 |
4.5°/77.2° |
|
|
精度 |
5cm@50 |
|
|
测距 |
190m@10%反射率@100klx 450m@80%反射率@0klx |
|
|
激光 |
测距模式 |
TOF |
|
激光等级 |
Class 1 |
|
|
波长 |
905nm |
|
|
发散角 |
0.03°H×0.28°V |
|
|
点频 |
240kpts/s |
|
|
回波数 |
三回波 |
|
|
回波强度 |
8bits |
|
|
测距精度 |
±2cm |
|
|
POS |
水平定位精度 |
0.02m |
|
高差定位精度 |
0.03m |
|
|
横滚/俯仰精度 |
0.006° |
|
|
航向角精度 |
0.03° |
|
|
GNSS数据更新频率 |
20Hz |
|
|
惯导数据更新率 |
200Hz |
|
|
防护等级 |
IP67 |
|
|
存储容量 |
32G 最大256GB |
|
|
电压 |
12v |
|
|
功耗 |
16W |
|
|
工作温度 |
-20℃~65℃ |
|
2.4 系统配置
|
序号 |
部件名称 |
单位 |
数量 |
|
1 |
D2000无人机 |
套 |
1 |
|
2 |
D-LiDAR2000激光雷达模块 |
套 |
1 |
|
3 |
D2000地面数传模块 |
套 |
1 |
|
4 |
无人机管家专业版(测量版) |
套 |
1 |
|
5 |
D2000智能电池 |
组 |
2 |
|
6 |
D2000智能电池充电器 |
个 |
1 |
|
7 |
D2000作业运输箱 |
个 |
1 |
|
8 |
网络RTK及PPK服务 |
年 |
1 |
三、 系统特点
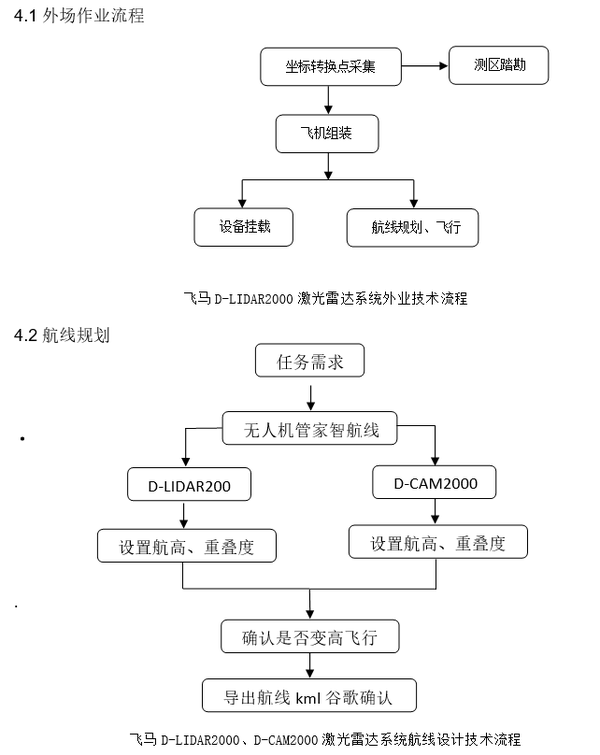
四、外业技术路线
五、 内业数据处理流程
5.1数据预处理
a) 轨迹解算
利用无人机管家智激光模块,对原始数据进行轨迹解算、航带拼接、质量检查等操作,如下图所示:
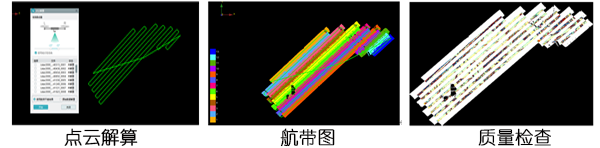
质量检查
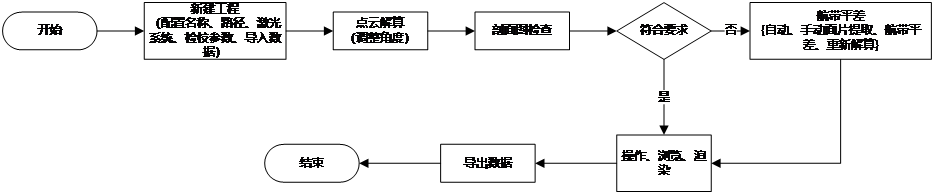
b) 点云数据预处理
点云数据预处理是在飞马无人机管家的“智激光”模块中,将轨迹解算后的数据和LIDAR原始数据进行融合,来获得标准格式的点云的过程,具体步骤如下图:
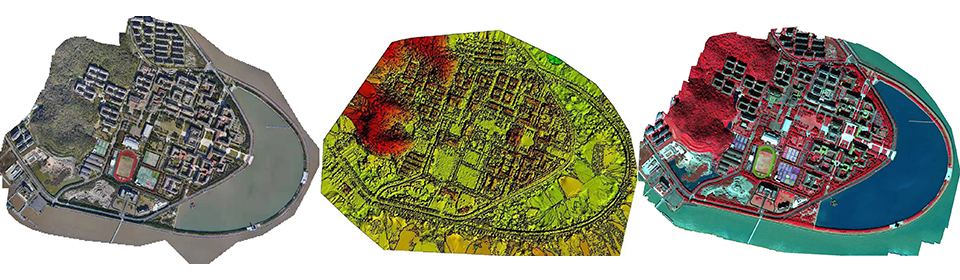
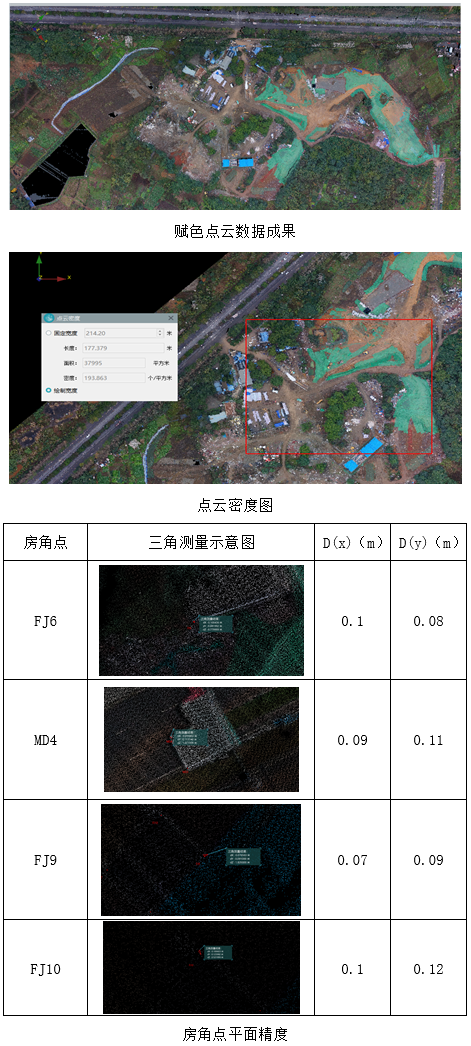
c)点云图示
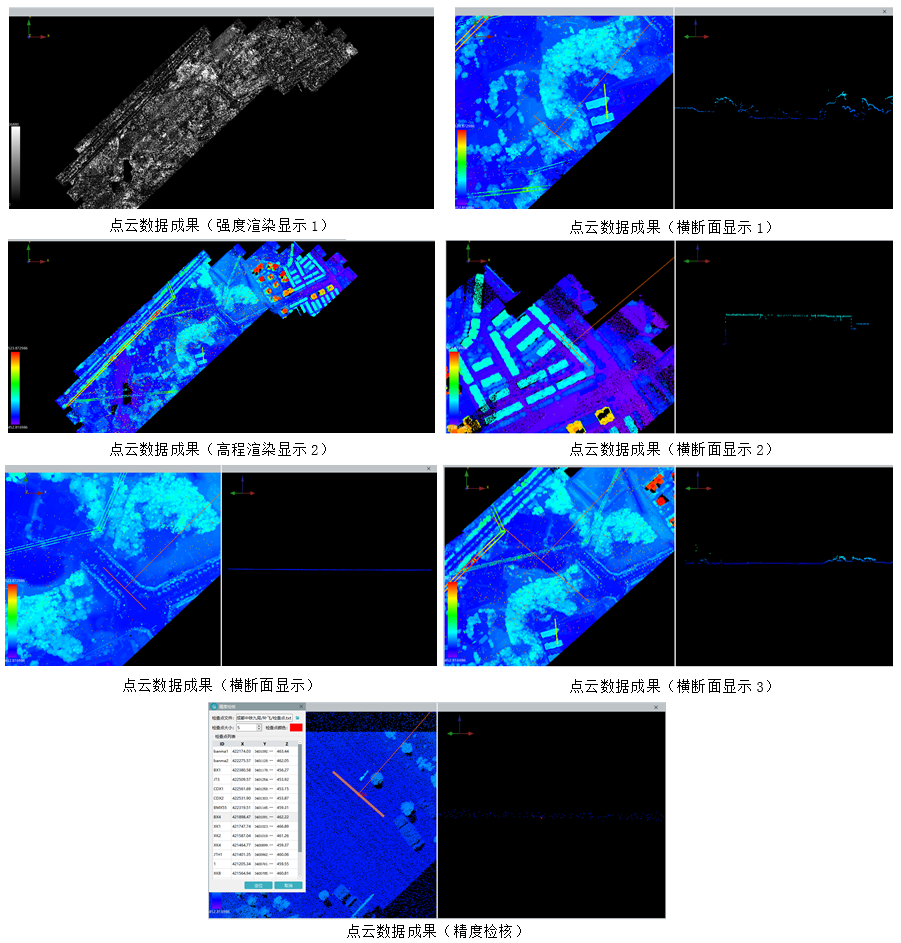
5.2数据精度验证
在无人机管家中将RTK测量的全部检核点坐标导入激光点云数据中,检核激光扫描点云高程精度,检核后的点云均方根误差为4.7cm,最大误差为9.8cm;飞行高度80m,与系统标称精度相符合。
本项目在目标测区共测得16个检核点无人机管家软件通过读取检核点平面坐标实现与点云数据的位置匹配,自动寻找到距离检核点最近的点云模型面后进行一键化的高程误差评估计算。本次演示高程最大误差为9.8cm,最小为 0.003cm,中误差为4.7cm,成果优于10cm的精度要求。
5.3结论
本方案选用飞马D-2000搭载D-LIDAR2000激光雷达,航高采用的是80米变高飞行。450 m测距能力,三回波和高精度的产品特性,能有效的满足山地作业环境,且能有效的穿透植被,获取大量的地面点,能有效保证作业效率。
采用飞马D2000无人机+D-LIDAR2000高精度激光雷达系统,在保证精度的同时拥有可观的作业效率,可有效满足地形测量、土方测量、植被调查等行业应用要求,同时D2000的变高航线功能,对于一些高差较大的测区,既可以保证不同高差下测区的点密度和精度,同时能够保证飞行安全,为客户的安全作业保驾护航。
更多产品信息,请联系安徽墨卡托科技有限公司。
--------
安徽墨卡托科技有限公司 China Mokato Limited