三维激光扫描(3D Laser Scanning)技术是近二三十年才发展起来的一种新的测量技术。它是利用激光测距的原理,通过记录被测物体表面大量的密集的点的三维坐标信息和反射率信息,将各种大型的、复杂的、不规则、标准或非标准等实体或实景的三维数据完整的采集到电脑中,进而快速复建出被测目标的三维模型及线、面、体等各种图件数据。另外,结合其他逆向工程软件和各领域的专业应用软件,它所采集点云数据还可进行各种后处理应用。由于三维激光扫描能够完整、准确、精细的刻画目标物体,因此三维激光扫描技术又被称作“高清晰测量(High Definition Surveying)”。
利用激光进行距离测量已有近四十年的历史,而自动控制技术的发展使得三维激光扫描最终成为现实,从而也实现了从传统的测距仪、全站仪的单点测量进化到目前三维激光扫描技术的线测量或者说面测量的阶段。三维激光扫描系统技术的应用包含两个方面的重点内容,一个是如何获取高精度的点云(Point Cloud)数据;另一个是如何对获取的点云数据进行后期的处理和分析,以提取所需要的信息。
目前,三维激光扫描技术主要应用领域包括文物古迹保护、建筑、规划、土木工程、工厂改造、室内设计、建筑监测、交通事故处理、法律证据收集、灾害评估、船舶设计、数字城市、军事分析等。
三维激光扫描仪是一种非接触式主动测量系统,可进行大面积高密度空间三维数据的采集,具有点位测量精度高、采集空间点的密度大、速度快等特点,且融合了激光反射强度和物体色彩等信息,三维激光影像数据为测量目标的识别分析提供了进一步的研究内容。
三维激光扫描仪通过脉冲测距法获得测距观测值 S,精密时钟控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值θ。三维激光扫描测量一般使用仪器内部坐标系统 Pi,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。由此可得三维激光脚点P 坐标(XS,YS,ZS )的计算公式如下式:
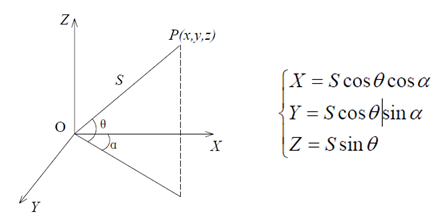
图1 三维激光扫描仪空间坐标示意图
一个典型的三维激光扫描系统,主要包含硬件部分,软件部分和附件部分。
硬件部分主要包括扫描仪、三脚架、基座、笔记本电脑等;软件部分主要包括用于控制扫描仪进行数据传输和存储的软件以及后处理的软件。一般的三维激光扫描系统的厂商都会随硬件提供给用户用于数据采集管理的软件,如Faro公司的FaroScene;或是提供了接口可用其软件对硬件的数据获取提供管理。
按照不同的分类标准,扫描仪可以分为不同的种类。按照扫描获取的精度和作用距离来划分,三维激光扫描仪可分为近距离扫描仪、中远距离工程型扫描仪和长距离机载扫描仪。
近距离扫描仪,比如手持式激光跟踪仪Leica T-Scan,其测量范围可达30米,精度可达到微米级;柯尼卡-美能达公司的Vivid 910系列扫描仪,其测量范围0.6~2.5米,扫描精度可达到0.01毫米。近距离扫描仪主要被汽车制造厂商和重工业企业广泛使用,不但可满足汽车、航空航天和精密机械领域的客户关于精密计量的需要,还活跃在设计领域,协助客户解决高精尖工程难题,从而显著加速了客户的创新流程。
中远距离的工程型扫描仪,扫描的工作范围为一米至数百米,扫描的精度达到毫米级。如FARO公司的X330相位式三维激光扫描仪,工作距离1米~330米,扫描精度可达到2毫米。工程型扫描仪主要应用在传统的测绘测量领域,作为传统测量手段的更新使用。一方面大大提高了效率,节省了人力成本,缩短了工期;另一方面由于扫描仪有非接触测量的特点,因此对于一些特定的应用优于传统方法。
工程型扫描仪应用领域包括文物古迹保护、建筑、规划、土木工程、工厂改造、室内设计、建筑监测、交通事故处理、法律证据收集、灾害评估、船舶设计、数字城市、军事分析等。
长距离机载扫描仪,主要是指激光雷达(LiDAR)。激光雷达是"光探测和测距"(Light detection and ranging,LiDAR)的简称,主要由IMU/DGPS系统、激光扫描测距系统和成像装置所组成。一般机载LiDAR)的飞行高度在几百米至几千米之间。例如,一般机载激光扫描系统,其飞行高度范围从200m至6000m,获取数据的平面精度和高程精度可达10厘米。LiDAR具有自动化程度高、受天气影响小、数据生产周期短等特点,为获取高分辨率地球空间信息,提供了一种全新的技术手段。目前,LiDAR主要用于军事上获取三维地理信息和民用的资源勘探、城市规划、农业开发、水利工程、土地利用、环境监测、交通通讯、防震减灾及国家重点建设项目等方面
按照扫描仪的承载介质的不同,扫描仪可分为地面型扫描仪,车载型扫描仪和机载型扫描仪。地面型扫描仪主要架设在三脚架上或平整的物体表面上。车载型扫描仪有架设在汽车上的和地铁轨道的轨检车上的两种。机载型主要是挂载在航空器上,如小型飞机,无人飞机或飞艇等。按照工作原理的不同,扫描仪可分为脉冲式扫描仪和相位式扫描仪。
5.1 原始点云数据
点云数据是实际物体的真实尺寸的复原,是目前完整、精细和快捷的对物体现状进行档案保存的手段。点云数据不但包含了对象物体的空间尺寸信息和反射率信息,结合高分辨率的外置数码相机,可以逼真的保留对象物体的纹理色彩信息;结合其他测量仪器诸如全站仪、GPS,可以将整个扫描数据放置在一定的空间坐标系内。
通过专门的点云浏览软件,我们可以在点云中实现漫游、浏览和对物体尺寸、角度、面积、体积等的量测。彻底替代了传统的用皮尺测量的方法,直接将对象物体移到电脑中,利用点云在电脑中完成传统的数据测绘工作,是完全的将实景复制到了电脑中。
5.2 二维线画图件
作为传统测量测绘尤其是建筑测量的成果之一,是各种的线画图件,包括平面图,立面图和剖面图等。这些图件可以表示建筑物内部的结构或构造形式、分层情况,说明建筑物的长、宽、高的尺寸,地面标高,层顶的形式,门窗洞口的位置和形式,外墙装饰的设计形式和各部位的联系、材料及其高度等。利用点云数据,在CAD中使用一些专门的点云编辑的插件,可以方便的做出建筑物的平面、立面和剖面图。不但生产速度大大提高,且减少了外业人员工作量,并能让现有CAD技术人员充分利用自有的CAD制图技术。
5.3 网络发布的点云数据
利用一些专门软件的发布模块和插件,扫描的点云可以发布在互联网上,让远端用户通过互联网有如置身于真实的现场环境之中。发布的点云不但可以网上浏览,还可以实现基于互联网的量测、标注等。这有利于数据共享和现有目标对象的网上展示。尤其是对于一些不宜向公众开放的文物景点或是突发事件的现场等,通过网上发布的彩色点云数据,可以满足公众的网上虚拟浏览的需求。再比如利用Skyline软件,可以将点云数据导入到Skyline网络发布平台上,让用户在网络环境下远程三维动态浏览三维点云数据。
5.4 三维模型
三维激光扫描仪比较适用于各种工业厂房、近现代建筑、石化厂、炼油厂、海油平台、古典建筑和佛像、雕塑、壁画、石窟等的扫描和三维建模。扫描的数据可以利用随机软件或其他第三方软件进行建模,构建mesh格网模型,再通过纹理映射或是导入到其他三维软件中进行纹理贴图,最终得到目标对象的数字化仿真模型。
5.5 视频动画
一些软件提供给了空间漫游和电影动画制作功能。在扫描后的点云中设置漫游路径,可以实现有如真实空间中的漫游效果。通过软件自带的记录功能,可以将漫游过程录制成电影文件,是虚拟旅游的很好的工具,也有利于作为成果进行宣传和展示。
6.1 数据处理流程
点云作为基础数据,记录了目标对象的坐标信息、反射率信息和纹理信息。而对点云的处理,主要分为色彩的处理、点状和线状特征的提取和体特征的提取。
点云作为客观世界的真实记录,色彩还原是基础的步骤。原始的点云数据一般都是单色或者假彩色。单色是给点云赋予了单一的色彩,而假彩色则是根据一定的规则,比如点云中点的反射率的强弱(返回激光与出射激光之间的能量比值)或是点的高度,有规律的赋予每个点彩色信息。对于建筑文化遗产保护而言,一般需要还原为真彩色的点云数据。通常,采用高分辨率的数码相机记录下真实的色彩和纹理,通过软件,进行纹理映射,将点云还原成真彩色。
对于点状和线状特征的提取,一般在现有的点云处理软件都可以实现。点状特征比较容易提取,可直接在点云中捕捉。线状特征可直接通过捕捉关键点生成,也可通过软件中的一些算法实现。比如利用基于CAD的插件,可在CAD中打开点云数据,进行切片处理,得到的点云切片可通过软件自带的拟合功能,将直线、圆、弧段等线状特征通过计算自动拟合生成。
对于体特征的提取,如果对象是规则的几何体,可通过点、线、平面、柱体、台体、球体等或它们的组合加以实现。而对于非规则对象,特别是现代建筑等对象,其表面是复杂曲面,无法通过规则的几何体进行表面建模,就需要专门的软件进行体特征的提取。这类软件主要有Polyworks和Geomagic等。其方法是通过一定的算法,构建对象表面的三角格网,从而形成对象的表面模型。再通过专门的虚拟现实软件,比如3D max或Skyline等展示平台,可以将对象进行数字化的展现。
6.2 点云的精度
作为基础数据,点云的质量直接影响后期处理的成果的精度。点云的精度一般包含了单点测量精度、角度精度、表面模型的精度、标靶的精度、双轴补偿器的精度等。国内学者对于扫描仪的精度指标,已经有了一些探究。其中,前三者与数据获取的硬件设备紧密相关;而模型表面精度很大程度上取决于软件的算法。距离精度是指沿着激光发射装置和被测物体的连线的方向上,测量值和真值之间的偏差。点位精度是指垂直于激光发射装置和被测物体的连线的方向上,测量值的与真值之间的偏差。距离精度和点位精度,统称为点云的范围噪音。范围噪音与数据获取的硬件设备的精度直接相关,也与外界环境,比如温度、气压和被测物体本身的反射率相关。并且,由于激光测量的误差始终存在,决定了范围噪音随着硬件技术的提升只能尽可能的减小,不能完全杜绝。图2显示了同一个被测物体(横线代表被测的墙面)的高范围噪音和低范围噪音的数据,其中的小圆点代表了点云数据中的一个点。
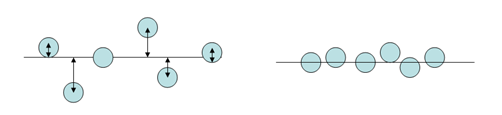
图2 高范围噪音(左)和低范围噪音(右)的点云数据
需要强调的是,范围噪音是一个基于单点测量的精度的概念,它是多次重复测量的单点精度和重复性的度量,不是整体点云的绝对的准确度。这里需要引入一个描述点云的处理结果精度的概念:模型表面精度。所谓模型表面精度,是指利用软件对点云中的大量的散点进行统计分析后,建立表面模型,得到的模型与真值之间的偏差。以图中的两个数据为例,分别对两个数据进行统计分析建立模型之后,拟合出来的模型平面将非常接近。并且拟合出来的结果与真实墙面之间的偏差要大大小于范围噪音。也就是说,由于模型表面精度是对大量散点统计计算后得出的结果,因此其比范围噪音在数值上更小,也即模型表面精度要优于范围噪音。模型表面精度与点云的质量有关,也与软件中的算法有关。
6.3 三维激光扫描系统的工程规划
6.3.1 规划的意义
三维激光扫描的工作是一个系统工程,按照流程,主要包括规划、采集、拼接、建模、发布等五个大的流程环节,涉及到外业数据的采集和内业数据的处理。因此必须在前期有个完整的规划,才能保证扫描工作能够在计划(时间、精度、成本)规定的范围内完成。扫描规划的意义,就是通过合理的外业扫描方案制定和工程的时间进度计划制定,以保证扫描项目工程达到时间和经济上的利益优化。
6.3.2.规划的内容
三维激光扫描系统的工程规划包括外业的扫描规划和整个项目工作的时间规划。
由于三维激光扫描仪的工作原理是基于激光测距,因此也决定了在有遮挡的地方,激光无法形成回波,因而无法获取数据,造成数据的缺失,形成点云中的空洞区。这些缺失的数据必须通过搬站多次扫描的方式进行弥补。而架设的站点的数量,决定了外业的工作时间和获取的点云的数据量。由于点云数据是海量数据,每多一站的扫描,不仅带来的是时间上的不经济,会增加外业工作的时间和成本,更多的是大量的点云数据的累积,对于后期的数据拼接和处理等增加工作量,增加了内业的处理时间。
在一些大型的扫描项目中,为了提高整体精度,不仅仅需要用到扫描仪,还需要配合全站仪使用,利用全站仪布置控制网。控制点的选择也需要在前期进行合理的规划。控制点的选择,既要项目满足精度要求,又要有满足现场通视性的要求,还要求与扫描仪工作时能够有效的配合,相互间可同时作业,而不相互干扰。此外,现场扫描之前,标靶的摆放位置和摆放数量,以及标靶的命名规则,都需要前期有个规划。
三维激光扫描系统的时间规划,则是基于扫描工程项目的成果需求,综合考虑外业数据获取时间与内业数据处理时间,以及工程团队的人力资源情况,进行的整体的项目时间安排。
6.3.3 规划的方法
1. 外业规划的方法
从外业来说,需要规划的内容很多,包括标靶的命名、站点的选择、控制点的布设、精度选择、扫描日志记录内容等。首先,在进行外业规划的时候,一般需要进行现场踏勘,并需要有详细的现场注记和草图,这两个文件对于扫描工程是非常重要的。现场注记和草图应该有一个包括扫描区域的平面图,能显示扫描仪和标靶的位置,以及每一站的标靶的名称。另外,从扫描位置看出去的透视图也应该画一个,这有助于内业处理时了解数据的获取时的情况,尤其是在遇到类似于标靶编号错误等复杂的情况时。 图3就是一个规划草图的实例,在该扫描工程中,规划共对建筑物(亭子)进行两站数据扫描,两站共用4个标靶用于拼接。结合现场查看的结果,我们可以在该草图中绘制出整个扫描现场的扫描仪站点位置、标靶位置、标靶编号和每站扫描的视场角范围。基于这个草图,我们就能够完成对这两站扫描工程的外业扫描中的站点位置的规划。
此外,在规划阶段,我们还可以制定一个扫描日志的模版。扫描日志可以记录数据获取阶段的一些细节信息,有助于数据内业人员对数据处理的理解,减少错误和返场次数。表1就是一个扫描日志的例子。针对我们的规划草图3,在数据获取阶段,我们可以详细记录站点位置,测站的ID,每一站有几次扫描,每一站扫描的标靶名称,该站扫描的范围,备注信息和该站扫描在点云数据中的点云视图的名称。这个扫描日志全面的记录了外业数据获取时的重要和必要的信息,一方面可以保证现场扫描按计划有序的进行,另一方面也为后期数据处理时遇到问题进行查询提供了依据。
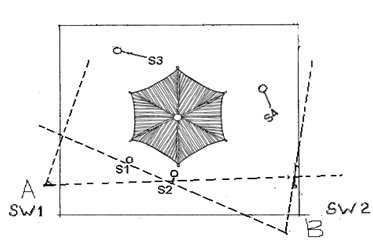
图3 外业规划草图

通过现场注记和现场草图工具,我们就能够实现用少量的站点数获取完整的点云数据。
2. 时间规划的方法
三维激光扫描系统的工程规划中的时间规划,属于项目管理中的时间管理一种。一般来说,时间规划确保了整个工程能够在预期的时间内完成。进行时间规划需要关注以下六个方面的因素:明确成果范围、排列工程活动次序、估算工程资源、估算活动持续时间、制定进度计划。
成果范围决定了所花费的时间和人力成本,对于三维激光扫描系统工程而言,外业扫描的数据密度要求越高,其数据获取的时间会越长,相应的数据量会更大,对后期业内处理的也会增加工作量;而成果的精度的不同也会带来数据处理时间上的显著差异。从目前的时间经验来看,一般外业和内业的处理时间一般在1:3-1:5之间,即一天扫描的数据,根据成果的范围不同,可能需要3-5天的处理时间。
在成果范围明确了之后,可对整个扫描工程项目的活动依次进行排序,主要包括采集、拼接、建模和发布等几个大的活动。在排列完工程活动次序之后,可估算整个扫描工程可以利用的所有资源,包括人员、设备和现场作业环境条件。上述工程资源进行了估算之后,则可进行每个工程活动的持续时间的估算。
由于在进行时间估算的时候,会有不确定性的因素。因此,考虑这些不确定性因素或可能潜在的风险,会提高上述每个工程活动的持续时间估算的准确性。
目前,三维激光扫描技术的应用领域广泛,主要包括:
1)各种项目任务及产品战略的系统仿真、战略规划、实效推延、电脑模拟、预研预演、虚拟现实分析及评估。
2)实物原始三维数据及结构形态的现场采集、非线性采集、三维存档、改造改进、逆向三维重构、任务仿真、模拟及评估、结构特性分析、校验正向设计、各种结构特性测试及试验等。
3)改造工程中的工程规划、吊装、装配、管道布线、方案评估、校验、布局仿真、三维可视化管理等。
4)设施的变形、老化、维修、检测、监测、翻新、更新、加工、仿研、仿制、结构分析、强度分析、静动力分析、加载分析、碰撞试验、结构仿真、内视等。
5)企业可视化管理及虚拟现实应用,如:训练、培训、试验、虚拟制造、虚拟设计、虚拟试验、虚拟视景、设施管理、GIS展示等。
6)设施的二维制图还原(如:针对陈旧设施、年久失修的设施、数据缺损的设施、老化变形的设施等)及无纸化操作。
(版权所有,违者必究)
--------
安徽墨卡托科技有限公司 China Mokato Limited